
Warehouse automation has crossed a threshold where the sensor a robot uses isn’t a spec-sheet detail — it’s a strategic decision that shapes uptime, safety margins, and ultimately, return on investment.
The 2D vs 3D LiDAR debate is now the defining technical choice for any warehouse operator scaling autonomous mobile robots. Early AGVs relied on magnetic tape, floor-embedded wires, and fixed-path guidance — systems that worked only when nothing changed. LiDAR-driven SLAM navigation broke that constraint, giving vehicles the freedom to adapt to shifting inventory layouts and unpredictable human traffic. According to the International Journal of Advanced Robotic Systems, 2D LiDAR remains the industry standard for SLAM in structured environments with consistent floor planes — and for good reason. Its low-latency, high-frequency scan data feeds positioning algorithms efficiently, keeping costs and computational overhead low.
The problem is that modern warehouses are no longer “structured environments with consistent floor planes.” Inventory stacks higher. Throughput demands tighter aisle tolerances. Human-robot collaboration zones multiply. A single horizontal scan plane, however precise, cannot account for the vertical complexity that defines today’s high-density logistics operations.
That’s where the blind spot problem emerges. A robot navigating confidently on a 2D plane can be completely unaware of a hazard six inches above or below its scan beam — a gap with consequences measured in damaged goods, injured workers, and unplanned downtime. As smarter robotic platforms proliferate, the sensor stack must evolve with them.
ROI in warehouse automation isn’t just about hardware purchase price — it’s about what a sensor costs you when it can’t see. The next section examines exactly what those blind spots are hiding.
The Hidden Costs of 2D LiDAR Blind Spots
2D LiDAR’s single-plane detection leaves entire vertical dimensions of a warehouse unmonitored — and those blind spots carry real financial and safety consequences.
Detection plane. A standard 2D scanner sweeps one horizontal slice, typically 15–30 cm above floor level. That plane catches pallets and walls reliably, but it completely misses overhanging hazards. Forklift tines extended at chest height, hanging plastic curtains at dock doors, low-clearance racks — all of these pass undetected. The AGV reads clear space and proceeds, often damaging product or equipment.
Floor-level failures. The opposite problem is equally costly. Debris scattered below the scan plane — shrink wrap, a dropped bolt, a pallet board — registers as nothing. Uneven ramp transitions and expansion joints can catch drive wheels unexpectedly, causing load shifts or full stops that require manual intervention to clear.
Throughput drain. Because 2D systems lack vertical context, they compensate with conservative safety zones. Any return that breaks the plane triggers an emergency stop, whether the cause is a real obstacle or sensor noise from a reflective floor surface. In practice, these false stops accumulate fast. A single AGV experiencing 8–10 spurious halts per shift can lose 45–60 minutes of productive runtime daily — a throughput hit that compounds across a fleet.
Safety exposure. In human-centric zones, single-plane detection is particularly risky. A worker bending down, crouching to retrieve an item, or leaning over the scan plane becomes effectively invisible to the vehicle. This isn’t a theoretical edge case; it’s a structural limitation of the technology.
When comparing 2d vs 3d lidar for agv deployments, the gap in situational awareness is stark. 3D LiDAR reduces collision rates by up to 90% in complex environments compared to 2D systems, according to Logistics Management research — a figure that points directly toward how much richer environmental data changes the risk calculus entirely. That richness, and what it enables beyond simple obstacle avoidance, is where the real competitive advantage begins.
Semantic Understanding: The 3D Advantage
Effective warehouse AGV navigation has moved beyond simple proximity detection — the real competitive edge lies in understanding what an obstacle is, not just that it exists.
“The shift from 2D to 3D LiDAR is driven by the need for ‘semantic understanding’ of the warehouse, not just distance measurement.” — Robotics 24/7 / Peerless Media
Semantic understanding means an AGV can interpret its environment contextually — categorizing objects by type, behavior, and intent rather than reducing everything to a binary obstacle flag.
Object classification changes everything. A 2D scan sees a shape at a given distance. A 3D point cloud sees vertical profile, movement pattern, and volume. That distinction matters enormously on a busy warehouse floor, where a stationary pallet, a walking employee, and an oncoming forklift demand completely different responses. Misclassifying any one of them is either a safety incident or a costly operational delay.
Fluid path planning replaces stop/go logic. When an AGV can identify a slow-moving human versus a static rack, it doesn’t have to halt — it can reroute, slow, or yield dynamically. Modern SLAM systems built on 3D data process millions of points per second, giving the robot enough geometric context to make nuanced decisions in real time instead of defaulting to a full stop every time something enters its field.
Multi-layer data captures dynamic obstacles. A single horizontal scan plane misses objects that are low to the ground, elevated on shelving, or partially obscured. Stacked sensor layers in a 3D system build a volumetric picture that updates continuously — flagging a load that’s shifted on a pallet, or a worker crouching in an aisle, before proximity becomes a problem.
That said, not every warehouse environment demands this level of perceptual sophistication — which raises a reasonable question about when 2D still gets the job done.
SLAM and Navigation: When 2D is Still Enough
Not every warehouse demands 3D perception — in the right environment, 2D LiDAR remains a capable, cost-effective tool that delivers genuine lidar ROI for logistics operations.
In structured, predictable environments, 2D LiDAR is not a compromise — it’s a deliberate, smart choice.
Structured environments are where 2D systems genuinely shine. Facilities with consistent floor planes, straight aisle walls, and minimal vertical complexity give 2D LiDAR exactly what it needs: clean, repeatable geometry. As noted by the International Journal of Advanced Robotic Systems, 2D LiDAR offers sufficient data for SLAM without the computational overhead of processing millions of 3D points — a real advantage when deployment speed matters.
The use cases where 2D still performs reliably include:
- Standard pallet transport in dedicated lanes with low human traffic
- Fixed-route AMRs operating in mapped, obstacle-clear zones
- Simple obstacle avoidance in controlled “clean” areas like cold storage corridors
- Rapid SLAM deployment where wall-based feature extraction is straightforward
Computational overhead is a practical concern that often gets overlooked in sensor comparisons. A 2D scan produces a manageable data stream that onboard processors can handle without specialized hardware. This translates directly to faster commissioning timelines and lower upfront integration costs — factors that matter when deploying dozens of units across a single facility.
On the other hand, these advantages come with a ceiling. The moment a warehouse introduces dynamic racking heights, significant pedestrian traffic, or irregular floor features, the 2D system’s efficiency begins to work against it.
What the structured-environment argument also sidesteps is the question of lighting conditions — a variable that 2D and 3D LiDAR handle very differently, and one that becomes especially critical in transition zones and low-light areas of modern distribution facilities.
Navigating ‘Dark Warehouses’ and Transition Zones
Environmental unpredictability — not traffic complexity — is often the factor that pushes warehouse AGVs past what 2D and vision-based systems can reliably handle.
Vision-based obstacle avoidance sensors fail most predictably at the extremes of light. Cameras depend on ambient illumination and consistent contrast to detect objects. When a forklift bay floods with afternoon sunlight or a loading dock shifts from bright outdoor glare to dim interior shadows, image-based systems can saturate or lose feature tracking entirely. These aren’t edge cases — they’re daily realities in active distribution facilities. A robot that navigates confidently at noon may hesitate or stop unnecessarily at dusk, generating costly throughput disruptions.
Outdoor-to-indoor transitions represent one of the most demanding scenarios for any autonomous platform. Loading dock ramps compound the challenge further — a vehicle moving from a sunlit yard down a sloped concrete ramp into a shadowed receiving area faces simultaneous shifts in lighting, gradient, and surface texture. Slope detection requires vertical-axis awareness that a single 2D scan plane simply cannot provide. The Association for Advancing Automation (A3) identifies multi-layer 3D LiDAR as essential for AGVs operating in these outdoor-to-indoor transition zones and in fully dark warehouse environments where lights-out operations are standard.
3D LiDAR’s self-emitted laser pulses cut through this variability entirely. Unlike cameras, LiDAR generates its own light source — pulsed infrared beams — and measures the return time to build a precise point cloud. Darkness, shadows, and glare become irrelevant. For operators exploring how 3D point clouds support localization in GPS-denied, light-variable spaces, this physics-based advantage is decisive. That reliability also has measurable financial implications — which brings us to the real question of whether the hardware investment pays off.
Calculating the ROI of a 3D Upgrade
Sensor selection is ultimately a financial decision, and the true cost of any LiDAR system extends well beyond the purchase order.
Upfront hardware costs are only one line item in a much longer TCO equation. A 3D unit may carry a higher initial price tag than its 2D counterpart, but that premium needs to be weighed against the compounding costs of operational friction — unplanned downtime, collision-related repairs, and the slow throughput bleed caused by overly cautious navigation logic.
False stops represent one of the most underappreciated drag factors on warehouse efficiency. When a sensor misreads a shadow, a forklift tine, or an overhead beam as a floor-level obstruction, the AGV halts and waits for human intervention. In high-velocity fulfillment environments, even a modest rate of false stops can erode throughput metrics by several percentage points over a shift. A 3D sensor’s volumetric awareness — built on the same spatial geometry that makes solid SLAM for AGV localization possible — dramatically reduces these phantom detections by distinguishing true obstacles from irrelevant geometry at height.
Safety liability is another variable that rarely appears on spec sheets but dominates risk conversations at the operations level. According to Logistics Management, 3D LiDAR provides full spatial awareness that minimizes downtime caused by accidents and equipment damage — a direct input to lower insurance premiums and reduced incident reporting overhead.
Future-proofing completes the ROI argument. Fleets that invest in 3D perception today are building the sensor infrastructure needed for more complex autonomous tasks — multi-level picking, dynamic rerouting, and human-robot collaboration zones — without requiring a full hardware refresh later.
Understanding these numbers abstractly is one thing. Seeing them play out in actual sensor behavior is another — and that’s exactly what a side-by-side visual comparison can reveal.
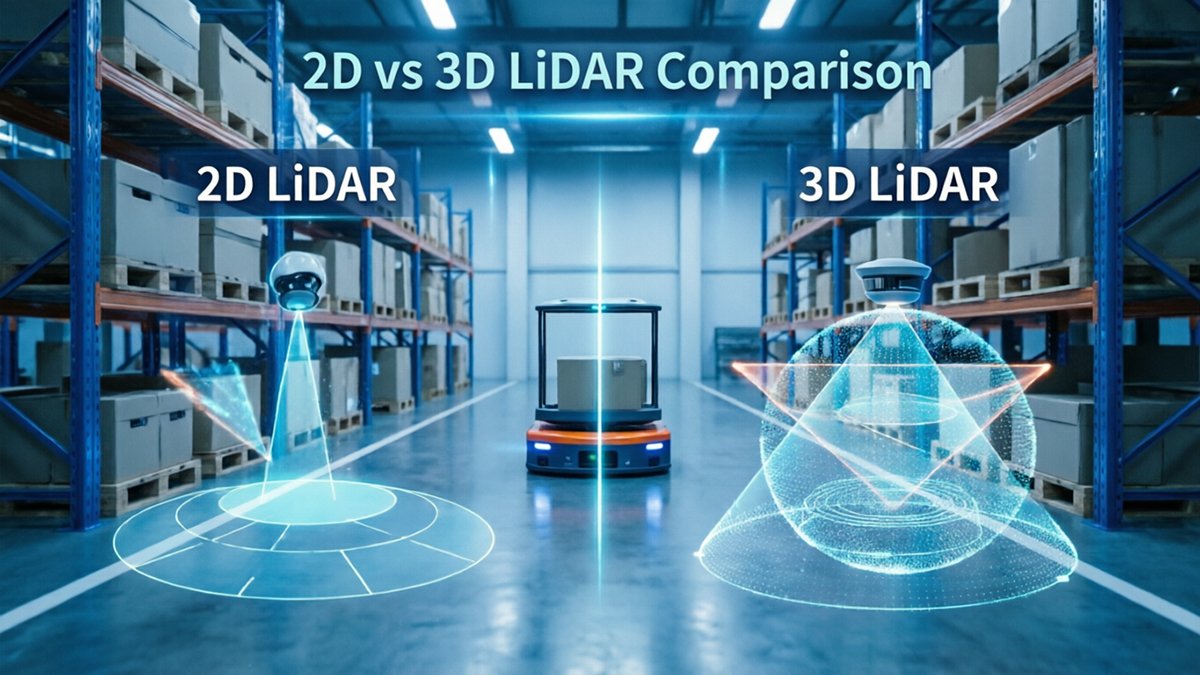
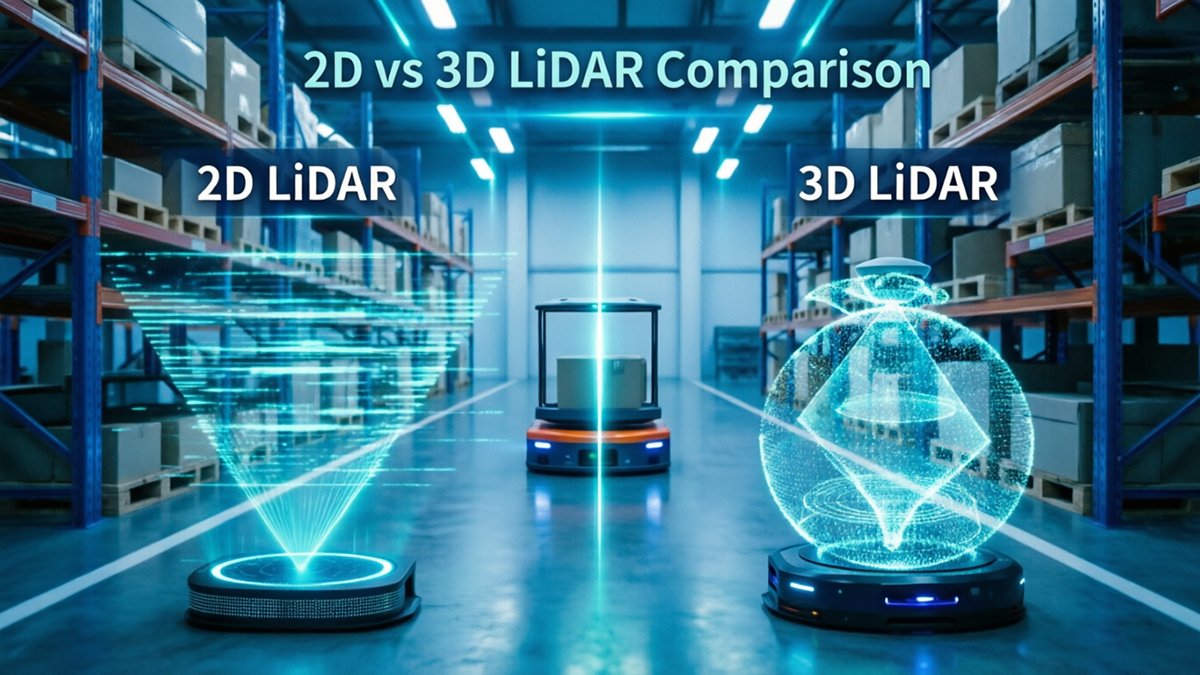
Visualizing the Difference: 2D vs 3D in Action
Seeing sensor output side by side is the fastest way to understand why 3D LiDAR for robotics is displacing flat-scan systems in demanding warehouse environments.
A 2D scan produces a single horizontal slice — essentially a ring of distance measurements at one fixed elevation. On screen, it renders as a sparse constellation of dots outlining walls, pallets, and columns at roughly knee height. Gaps between objects at different heights are invisible. A low-hanging conveyor bracket, a sloped loading ramp, or a forklift tine raised mid-travel simply don’t exist in that data layer. By contrast, a 3D volumetric point cloud stacks hundreds of scan planes simultaneously, producing a dense spatial mesh that captures vertical geometry in full. As the Association for Advancing Automation (A3) notes, 3D sensors capture depth data that 2D scanners miss entirely — including the slope of a ramp that could cause a loaded AGV to tip or stall.
Modern high-resolution spatial sensors make this density difference immediately visible in real-time visualization tools. The point cloud doesn’t just show where an obstacle is — it communicates what shape it is, enabling smarter path decisions before a collision is even possible.
When reviewing AGV sensor performance videos, prioritize these indicators:
- Point cloud density — more points per cubic meter means finer obstacle resolution
- Vertical coverage — confirm the sensor captures above-floor geometry, not just a single plane
- Latency — watch for lag between physical movement and map updates
- Edge-case handling — look for clips that include ramps, partial occlusions, or dynamic human traffic
What those clips reveal directly informs the practical sensor selection framework covered in the next section.
The Bottom Line: Choosing the Right Sensor for Your Fleet
Selecting the right LiDAR sensor isn’t about chasing the most advanced hardware — it’s about matching perception capability to your fleet’s actual operating demands.
The sensor decision comes down to three clear scenarios:
- Choose 2D LiDAR when your operation runs on structured, predictable floor paths, your budget is constrained, and standard SLAM is sufficient. For simpler fixed routes with minimal vertical hazards, 2D remains a cost-effective and reliable backbone. Pair it with simple zone-based detection for immediate binary obstacle signals with zero compute overhead.
- Choose 3D LiDAR when your facility involves high-density mixed traffic, overhanging racking, loading dock variability, or any application requiring semantic object recognition. As Quality Magazine notes, smarter robots demand smarter perception — and flat-scan sensors simply can’t deliver the spatial context that dynamic environments require.
- Consider a hybrid approach when the budget and architecture allow. A common pattern is deploying 2D for primary horizontal navigation while adding a 3D unit to compensate for vertical blind spots and overhead obstacles. This layered strategy captures most of the safety benefit at a fraction of full 3D fleet replacement cost.
On sourcing: Hardware decisions don’t end with sensor selection. Factory-direct procurement eliminates distributor markups that can inflate per-unit costs by 20–40%, directly improving the ROI timelines outlined earlier. Platforms offering direct factory pricing across both 2D and 3D sensor families give procurement teams the flexibility to right-size each vehicle without overcommitting to a single sensor tier. As Logistics Management notes, 3D LiDAR’s full spatial awareness is critical for ROI by minimizing downtime — but only when the unit cost is sustainable at fleet scale.
Still have questions about real-world integration, surface reflectivity challenges, or pairing sensor types on a single AGV? The next section tackles the most common decision points head-on.
Frequently Asked Questions: AGV LiDAR Selection
Choosing the right LiDAR configuration raises real engineering questions — here are direct answers to the ones that come up most often.
Can I use 2D and 3D LiDAR on the same AGV?
Yes, and in practice this hybrid approach is common during technology transitions. A 2D scanner can handle low-level floor-plane safety zones while a 3D sensor manages upper-space obstacle detection and navigation. The two data streams require careful sensor fusion to avoid processing conflicts, but most modern robotics middleware supports this architecture natively.
How does 3D LiDAR handle reflective surfaces in warehouses?
Reflective floors, shrink-wrapped pallets, and metallic racking are persistent challenges for any optical sensor. Modern 3D LiDAR units mitigate this through intensity filtering, multi-return processing, and adaptive threshold algorithms that distinguish genuine geometry from mirror artifacts. Tuning these parameters at deployment is essential — reflective-surface performance varies significantly between sensor models and firmware versions.
What is the typical range requirement for indoor AGV navigation?
Most warehouse AGVs operate effectively with a primary detection range of 15–30 meters, which covers aisle lengths, intersection clearance, and staging-area awareness. Shorter-range sensors (under 10 meters) create latency problems at higher travel speeds, leaving insufficient reaction distance. Matching range specification to your facility’s longest unobstructed corridor is a reliable starting point.
Is 3D LiDAR harder to integrate with existing SLAM algorithms?
It adds complexity, but not insurmountably so. Most established SLAM frameworks now support 3D point-cloud inputs, though computational load increases and map initialization times lengthen compared to 2D equivalents. Notably, because 3D LiDAR provides its own light source and captures data regardless of ambient lighting changes, map consistency improves across shifts — a real advantage that offsets the added integration effort.









