Traditional ground surveying has a timeline problem. Crews, equipment, and access constraints can stretch a single site assessment into days or weeks — a pace that modern infrastructure, forestry, and construction projects simply can’t afford. Something had to change, and it did.
The answer came from above. A UAV LiDAR system combines the mobility of unmanned aerial vehicles with active laser-pulse sensing to capture dense, precise 3D point clouds in a fraction of the time traditional methods require. According to the Journal of Unmanned Vehicle Systems, integrating LiDAR onto UAV platforms can reduce data acquisition time by up to 80% reduction in data acquisition time compared to terrestrial surveying — a figure that reframes what’s operationally possible on compressed project timelines.
The shift from passive data collection to active aerial sensing isn’t incremental — it’s a fundamental rethinking of how spatial intelligence gets built.
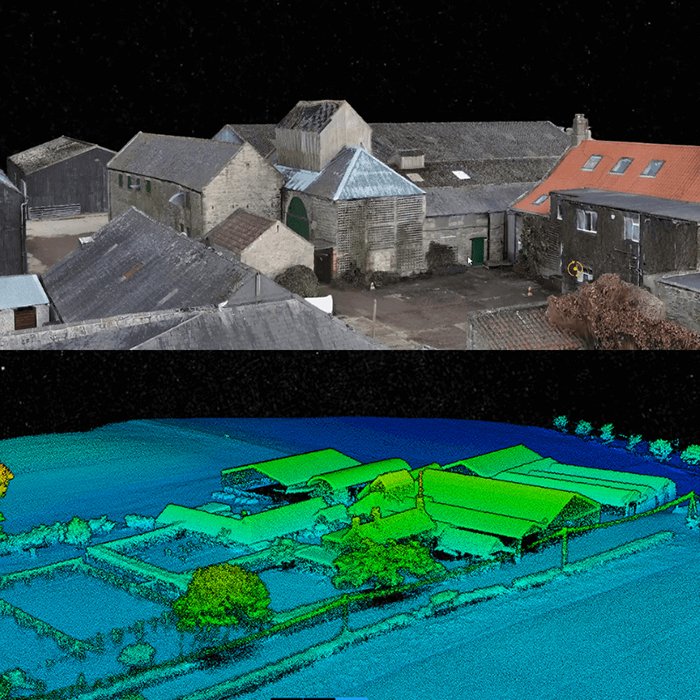
Unlike cameras that depend on ambient light and surface visibility, LiDAR fires its own laser pulses and measures return times to build true 3D models. This distinction matters enormously. Where conventional drone photogrammetry produces surface imagery, a UAV LiDAR system generates layered spatial data — capturing ground, structure, and vegetation simultaneously across a single flight pass.
The industry is moving from 2D representations toward volumetric, real-world spatial awareness. And that transition raises an important question: when it comes to raw accuracy, how does LiDAR actually stack up against photogrammetry in the field?
Drone LiDAR vs. Photogrammetry: The Accuracy Truth
Both technologies promise detailed aerial data. But the way they collect it — and what they can actually see — separates them significantly. For procurement managers weighing options, understanding that gap is essential before signing off on any platform.
| Factor | Drone LiDAR | Photogrammetry |
|---|---|---|
| Sensing type | Active (emits laser pulses) | Passive (relies on ambient light) |
| Vegetation penetration | High (multi-return capability) | Low (blocked by canopy) |
| Works in low light | Yes | No |
| Accuracy (typical) | ±1–5 cm | ±5–10 cm |
| Point cloud density | Very high | Moderate |
| Cost | Higher upfront | Lower upfront |
Passive vs. Active Sensing: Why the Light Source Changes Everything
Photogrammetry depends entirely on reflected sunlight and consistent surface contrast to reconstruct geometry. Overcast skies, shadowed terrain, or reflective surfaces can all degrade output quality. Drone LiDAR, by contrast, generates its own light — firing thousands of laser pulses per second regardless of ambient conditions. That independence from environmental lighting is a fundamental advantage, not just a convenience. In practice, this means LiDAR missions can proceed at dawn, dusk, or under heavy cloud cover where photogrammetry would stall or produce unreliable data.
Penetrating Dense Vegetation: The Multi-Return Advantage
Multi-return capability is where LiDAR’s lead becomes undeniable. According to the American Society for Photogrammetry and Remote Sensing, drone LiDAR systems using Time-of-Flight (ToF) technology deliver superior performance in dense vegetation by capturing multiple returns from a single laser pulse. One pulse can register the top of a tree canopy, mid-story branches, and bare ground simultaneously. Photogrammetry captures only the outermost visible surface — making it essentially blind beneath a forest canopy.
Accuracy Benchmarks: Sub-Centimeter Precision in Aerial LiDAR Mapping
Aerial LiDAR mapping consistently delivers tighter accuracy tolerances than photogrammetric workflows. Advanced systems routinely achieve vertical accuracies in the ±1 cm range under optimal conditions, a benchmark photogrammetry rarely matches without extensive ground control points. For engineering-grade deliverables — flood modeling, corridor surveys, structural inspections — that precision differential is the deciding factor.
The performance gap ultimately comes down to hardware. Which specific sensor architectures are enabling these results — and how to evaluate them for your application — is exactly what we’ll break down next.
Hardware Essentials: From 2D ToF to 128-Channel 3D Systems
Understanding why drone LiDAR outperforms alternatives is one thing. Understanding how the hardware actually works is where the real operational decisions get made. The sensor you choose determines what your drone can see, how accurately it maps it, and whether it can survive complex flight conditions.
Mechanical 3D LiDAR: Full-Sphere Awareness
Mechanical 3D LiDAR remains the gold standard for high-accuracy aerial mapping. These systems use rotating laser arrays — ranging from 16 to 128 channels — to generate dense, 360-degree point clouds in real time. The channel count matters: a 32-channel system captures meaningful detail, but a 128-channel sensor delivers the kind of resolution that separates centimeter-accurate survey data from generalized terrain models.
Critically, the 360-degree field of view isn’t just a mapping advantage. According to the National Institute of Standards and Technology (NIST), mechanical 3D LiDAR sensors offer spatial awareness that’s essential for simultaneous localization and mapping (SLAM) in GPS-denied environments — a capability that solid-state alternatives often can’t match. More on why that matters in a moment.
Solid-State and Forward-Facing Sensors
Where mechanical systems excel at comprehensive mapping, solid-state LiDAR sensors prioritize durability and directional precision. With no moving parts, they’re lighter, more shock-resistant, and better suited for forward-facing obstacle detection during flight. In practice, these sensors are often paired with mechanical units — one handling full-scene reconstruction, the other managing real-time collision risk in the drone’s travel path.
This pairing reflects a broader truth in UAV sensor design: no single sensor type does everything well. The debate between drone lidar vs photogrammetry often oversimplifies this; the real nuance lies in which combination of sensors fits the mission profile.
Blind Compensation at Low Altitude
Low-altitude flight introduces a specific problem: minimum detection range. Most LiDAR sensors have a blind spot — a zone immediately below the drone where returns aren’t processed. Blind compensation sensors, typically downward-facing 2D Time-of-Flight (ToF) units, fill that gap. They’re especially critical during takeoff, landing, and contour-following flights over uneven terrain.
Key sensor types at a glance:
- 16–32 channel mechanical LiDAR systems — lightweight mapping, moderate density
- 64–128 channel mechanical LiDAR systems — high-density survey work, advanced autonomous applications
- Solid-state LiDAR systems — obstacle avoidance, durability-first deployments
- 2D ToF blind compensation sensors — close-range detection, low-altitude safety
Diagram note for designer: Illustrate a UAV cross-section showing sensor placement — mechanical 3D LiDAR on the underbody, forward-facing solid-state unit at the nose, and downward 2D ToF sensors near the landing gear.
Selecting the right hardware configuration isn’t just a spec exercise — it directly shapes what environments a drone can navigate. And as missions move indoors, underground, or into structurally complex spaces, that hardware foundation becomes the difference between a successful flight and a costly failure.
Navigating the Complex: SLAM and Autonomy in Cluttered Spaces
Drone LiDAR accuracy doesn’t just matter for mapping — it’s the foundational requirement for safe, autonomous flight in environments where a single misjudgment can mean a crash, a failed mission, or worse.
That’s where SLAM (Simultaneous Localization and Mapping) changes the game. By continuously building and updating a 3D map of the surroundings in real time, SLAM-enabled drones know exactly where they are and what’s around them — simultaneously. LiDAR feeds this process with precise, millisecond-level distance data that cameras and sonar simply can’t match in low-light or feature-sparse conditions.
Operating Where GPS Fails
Outdoor surveys have the luxury of open sky. But some of the most valuable inspection targets — underground mines, multi-level warehouses, dense utility tunnels — are exactly where GPS signal drops out entirely. In these “blind-spot” environments, a drone relying on satellite positioning becomes little more than an expensive paperweight.
LiDAR-based navigation solves this directly. By referencing the point cloud it builds on the fly, a drone can maintain stable flight, avoid obstacles, and complete its mission without any external positioning signal. Autonomous navigation in confined industrial spaces — from logistics centers to underground infrastructure — is already shifting from experimental to operational across multiple industries.
The Road Ahead for Autonomous UAVs
The next leap is forward-facing and solid-state LiDAR — sensors designed to detect what’s directly in a drone’s flight path, not just below it. As IEEE Xplore Digital Library notes:
“The shift toward 3D solid-state and forward-facing LiDAR is essential for the next generation of UAV autonomy, enabling real-time obstacle avoidance in complex ‘blind-spot’ environments.”
For high-channel systems like the 128-channel platforms used in autonomous applications, the density of scan data enables near-instant environmental awareness — a critical advantage when flying at speed through cluttered airspace.
Understanding the hardware potential is one thing. Putting it to work in a real UAV workflow is where the details truly matter.
Implementation Guide: Integrating LiDAR into Your UAV Workflow
Moving from hardware selection and SLAM configuration to actual field deployment requires a structured approach. The gap between having the right sensor and running a reliable, repeatable aerial intelligence workflow is where most teams stumble. Here’s how to bridge it efficiently.
1. Assess your platform’s payload capacity first. Weight is non-negotiable. A sensor that pushes your UAV beyond its maximum payload doesn’t just degrade flight time — it compromises stability and, critically, positional accuracy. Most survey-grade multirotor platforms support payloads between 1.5 kg and 4.5 kg. Match your LiDAR unit, IMU, and GNSS receiver to a platform with at least a 20% payload buffer to account for mounting hardware and battery variance.
2. Calibrate boresight alignment before your first mission. Even minor angular offsets between the sensor and the IMU introduce systematic errors across entire point clouds. Run boresight calibration on a flat reference surface and verify results before heading into complex terrain.
3. Plan your flight paths around point density requirements. Altitude, speed, and scan rate interact directly. Lower altitude increases point density but shrinks coverage per pass. For most forestry and infrastructure applications, 50–80 meters AGL at 8–12 m/s delivers a practical balance.
4. Build a structured data processing pipeline. Raw point clouds need trajectory processing, noise filtering, ground classification, and — depending on your deliverable — canopy height modeling or feature extraction. Tools like LAStools, TerraSolid, or cloud-based platforms handle this progressively. Plan for processing time to equal roughly 2–4× your flight time.
5. Source sensors with verified industrial certifications and direct technical support. Triple-certified quality — CE, ROHS, and SGS — is the baseline standard for sensors used in serious global deployments. Working with a factory-direct supplier that offers real engineering support dramatically reduces integration friction, especially when configuring multi-return settings or syncing timing signals with autopilot systems.
“The fastest path from procurement to productive flight is a supplier relationship that doesn’t end at the invoice.”
For teams evaluating high-channel options, understanding how automotive-grade sensors translate to aerial platforms is worth exploring — solutions like 360° long-range sensor designs increasingly bridge the gap between ground autonomy and airborne intelligence.
Still have questions about accuracy thresholds, weather performance, or SLAM specifics? The next section addresses the most common technical questions teams face before and after deployment.
Frequently Asked Questions About Drone LiDAR
Got questions before committing to a drone LiDAR workflow? Here are the answers to the most common technical hurdles.
What Is the Typical Accuracy of a Drone LiDAR System?
Modern drone LiDAR systems routinely achieve horizontal and vertical accuracies in the 1–5 cm range under optimal conditions, making them a genuine replacement for traditional ground survey methods in many applications. Accuracy depends on several factors: sensor quality, flight altitude, GPS/IMU calibration, and point density. According to Pilot Institute, high-end systems can resolve features at centimeter-level precision — a benchmark that separates professional-grade equipment from entry-level alternatives.
Can LiDAR Work in Rain or Fog?
This is one of the most important caveats to understand. LiDAR performs significantly better than optical cameras in low-light or dusty conditions, but heavy rain and dense fog do introduce signal scatter that degrades point cloud quality. Light drizzle is generally manageable. In practice, most operators schedule flights in dry, stable atmospheric windows whenever precision mapping is the goal.
How Does LiDAR Improve SLAM in Indoor Environments?
Reliable 3D point clouds give SLAM algorithms the geometric anchors they need to localize accurately without GPS. In GPS-denied spaces — warehouses, tunnels, complex structures — LiDAR becomes indispensable. Sensors designed for autonomous indoor navigation integrate directly into ROS-based stacks running Cartographer or Nav2, enabling real-time map building with minimal drift. The result is stable, repeatable positioning even in featureless corridors where other localization methods typically fail.
Watch drone LiDAR point cloud generation in action:
[YouTube Embed Placeholder – ideaForge LiDAR Drone Demo: https://www.youtube.com/watch?v=wTp6BEEJiVY]
Drone LiDAR isn’t a single tool — it’s an evolving ecosystem. The right questions asked early will save significant time and cost down the line.
Key Takeaways
- 16–32 channel mechanical LiDAR systems — lightweight mapping, moderate density
- 64–128 channel mechanical LiDAR systems — high-density survey work, advanced autonomous applications
- Solid-state LiDAR systems — obstacle avoidance, durability-first deployments
- 2D ToF blind compensation sensors — close-range detection, low-altitude safety
- 80% reduction in data acquisition time compared to terrestrial surveying









