2D LiDAR + IMU + camera sensor fusion practical guide with setup checks, source-backed engineering context, field validation tables, and application guidance.
2D LiDAR + IMU + camera sensor fusion practical guide with setup checks, source-backed engineering context, field validation tables, and application guidance.

Picture a camera-equipped vehicle at dusk, navigating a westbound highway directly into a low sun. The sensor is effectively blind — washed out by glare, unable to distinguish a stopped vehicle from an empty lane. Now add a rain-slicked road at midnight. That’s not an edge case. That’s Tuesday. This is precisely why lidar for […]
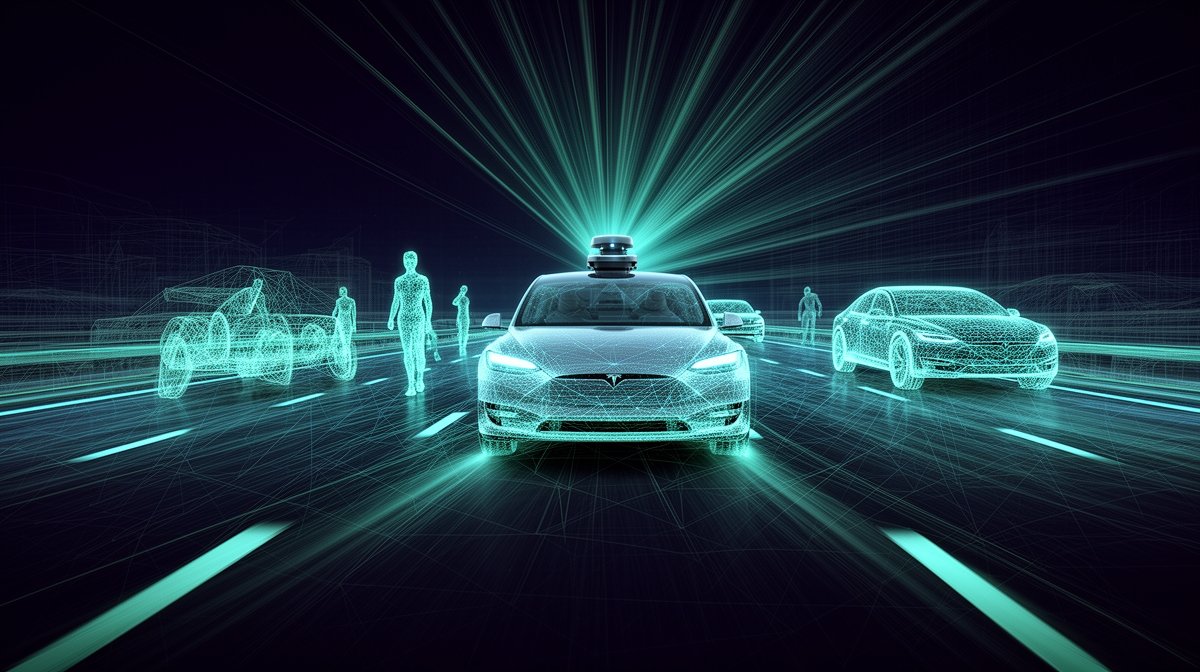
There was a moment—somewhere around 2019—when a quiet consensus shifted inside the world’s top autonomous vehicle programs. The engineering argument that lidar sensors in autonomous vehicles were an expensive luxury, a temporary crutch until cameras and neural networks matured, collapsed under the weight of real-world data. Depth ambiguity, low-light failures, and the brutal physics of […]
 ST-X10 FPV Drone
Original price was: $642.00.$638.00Current price is: $638.00.
ST-X07 FPV Drone
Original price was: $866.00.$862.00Current price is: $862.00.
ST-P136 FPV Drone
Original price was: $968.00.$958.00Current price is: $958.00.
ST-X07
ST-X10 FPV Drone
Original price was: $642.00.$638.00Current price is: $638.00.
ST-X07 FPV Drone
Original price was: $866.00.$862.00Current price is: $862.00.
ST-P136 FPV Drone
Original price was: $968.00.$958.00Current price is: $958.00.
ST-X07
 Hesai FTX
Original price was: $1,189.00.$1,168.00Current price is: $1,168.00.
Hesai FTX
Original price was: $1,189.00.$1,168.00Current price is: $1,168.00.
 Hesai JT128
Original price was: $1,189.00.$1,168.00Current price is: $1,168.00.
Hesai JT128
Original price was: $1,189.00.$1,168.00Current price is: $1,168.00.
 Hesai ATX
Original price was: $2,100.00.$1,980.00Current price is: $1,980.00.
Hesai ATX
Original price was: $2,100.00.$1,980.00Current price is: $1,980.00.
 Hesai AT128
Original price was: $2,680.00.$2,580.00Current price is: $2,580.00.
Hesai AT128
Original price was: $2,680.00.$2,580.00Current price is: $2,580.00.

