Picture a warehouse robot confidently navigating a busy floor — then colliding with a hanging conveyor belt it never “saw.” No sensor malfunction. No software glitch. The robot’s 2D LiDAR was working perfectly. It simply couldn’t look up.
The debate over 2D vs 3D LiDAR isn’t about hardware specs — it’s about whether a machine can truly understand its environment or only guess at it.
As YellowScan notes, 2D LiDAR scans a single horizontal plane, capturing only X and Y coordinates. Everything above or below that plane is invisible. For static, controlled environments, that’s often acceptable. But for any robot operating near humans — on a factory floor, in a hospital corridor, or on a public sidewalk — that blind spot isn’t a minor limitation. It’s a fundamental safety risk.
This is precisely why LiDAR for AGVs and autonomous mobile robots is rapidly shifting toward 3D sensing. The volumetric awareness that 3D delivers isn’t a luxury upgrade; increasingly, it’s the baseline for genuine autonomy.
| Dimension | Data Output | Typical Price Range |
|---|---|---|
| 2D LiDAR | Single plane (X, Y) | $100 – $1,500 |
| 3D LiDAR | Full volume (X, Y, Z) | $500 – $15,000+ |
Understanding why that gap exists starts with how each technology actually works at a mechanical level.
Defining the Planes: How 2D and 3D LiDAR Actually Work
Understanding why these technologies produce such different results starts with understanding how each one physically reads the world around it — think of the difference between a laser pointer and a flashlight.
2D LiDAR: The Laser Pointer
A 2D LiDAR unit fires a single laser beam outward while a rotating mirror sweeps that beam in one horizontal plane. The sensor emits a pulse, waits for the reflection, and calculates distance based on the time of flight. Repeat that process thousands of times per rotation and you get a flat, 360° slice of the environment — essentially a ring of distance measurements at one fixed height.
This simplicity is the technology’s greatest strength. The data output is lightweight, and the processing demands are minimal enough to run on basic microcontroller units (MCUs). That’s a significant advantage in cost-sensitive applications where computational headroom is limited.
The fundamental limitation, as the previous section illustrated with that warehouse collision scenario, is equally clear: anything above or below that single horizontal plane is invisible.
3D LiDAR: The Flashlight
Where 2D sensors scan a single plane, 3D LiDAR units deploy multiple laser channels simultaneously — ranging from 16 to 128+ beams, according to Hokuyo USA — stacked at different vertical angles. This multi-channel array (or, in some designs, an oscillating mirror mechanism) captures data across both horizontal and vertical axes. The result: a 360° horizontal field of view with up to 45° of vertical coverage, painting a volumetric picture of the surrounding environment rather than a flat outline.
Point Cloud Explained
A point cloud is the digital output of a 3D LiDAR scan — millions of individual XYZ coordinate points stitched together to form a precise spatial model, or “digital twin,” of a physical space. Each point represents a reflected pulse, and at sufficient density, those points resolve into recognizable structures: walls, vehicles, pedestrians, overhead obstacles.
Processing a dense point cloud in real time is computationally intensive. Unlike 2D data streams, 3D point clouds typically require GPU-accelerated processing to handle the volume of simultaneous calculations involved in object detection, classification, and mapping. It’s also worth noting that 3D LiDAR shares one important characteristic with LiDAR and radar alike: both technologies are active sensing systems that perform reliably in low-light and variable weather conditions, giving them a shared edge over purely camera-based approaches.
The processing cost of 3D data is real and consequential — and that trade-off between capability and expense plays out directly in deployment budgets, a dynamic worth examining closely.
The ROI of Depth: Cost vs. Performance Analysis
For a simple explanation of LiDAR pricing: you pay for the dimensions you perceive. The gap between a basic 2D scanner and a full 3D system isn’t just a hardware difference — it’s a fundamental shift in what the sensor can promise an autonomous system. And that gap has a very real dollar figure attached to it.
According to MorpheusTek, 2D LiDAR sensors range from roughly $50 to $2,000, while 3D LiDAR systems span $2,000 to $75,000+. That spread tells the whole story of where each technology belongs.
What Drives the Price Difference?
Several factors push 3D LiDAR costs well beyond its 2D counterpart:
- Laser count: 2D sensors use a single laser channel; 3D systems stack anywhere from 16 to 128 channels simultaneously
- Mechanical complexity: Traditional spinning 3D sensors contain precision motors, bearings, and rotating assemblies that are expensive to manufacture and calibrate
- Processing power requirements: Generating and interpreting dense point clouds demands significantly more onboard computation
- Data storage overhead: A single 3D sensor can produce hundreds of megabytes of point cloud data per minute, requiring robust storage and pipeline infrastructure
Solid-State vs. Mechanical: The Hidden Reliability Cost
Mechanical 3D scanners deliver exceptional coverage but introduce moving parts — and moving parts eventually fail. Solid-state 3D LiDAR, which uses no rotating components, is closing the reliability gap while also reducing unit costs. As Hesai notes, solid-state designs are increasingly viable for commercial deployment, where uptime directly translates to revenue.
On the other hand, 2D sensors — with their simpler mechanics — often outlast 3D counterparts in harsh industrial environments and require minimal maintenance.
The bottom line: 2D LiDAR earns its place in cost-sensitive applications like robotic vacuums and basic AGVs, while 3D systems justify their premium wherever missing a vertical dimension creates unacceptable risk. That trade-off plays out differently across every industry — and the specific deployment environment is ultimately what determines which sensor belongs on the machine.
Use Cases: From Warehouse Floors to City Streets
The gap between 2D and 3D LiDAR isn’t just technical — it’s deeply situational. The right sensor depends entirely on the environment, the stakes, and the task. Here’s how that plays out across four major domains.
Industrial: Flat Floors vs. Complex Inventory
For automated guided vehicles (AGVs) operating on flat warehouse floors, 2D LiDAR is widely considered the practical standard. The environment is structured, obstacles are predictable, and a single horizontal scan plane handles navigation reliably at a fraction of the cost. However, the moment a task shifts from moving through space to measuring it — calculating stockpile volumes, auditing pallet heights, or managing irregular bulk materials — 2D sensors become fundamentally inadequate. 3D LiDAR captures the full vertical geometry needed for accurate volumetric analysis. The two technologies often coexist in the same facility, each assigned to what it does best.
Best Fit: 2D for floor-level AGV navigation; 3D for inventory measurement and complex logistics.
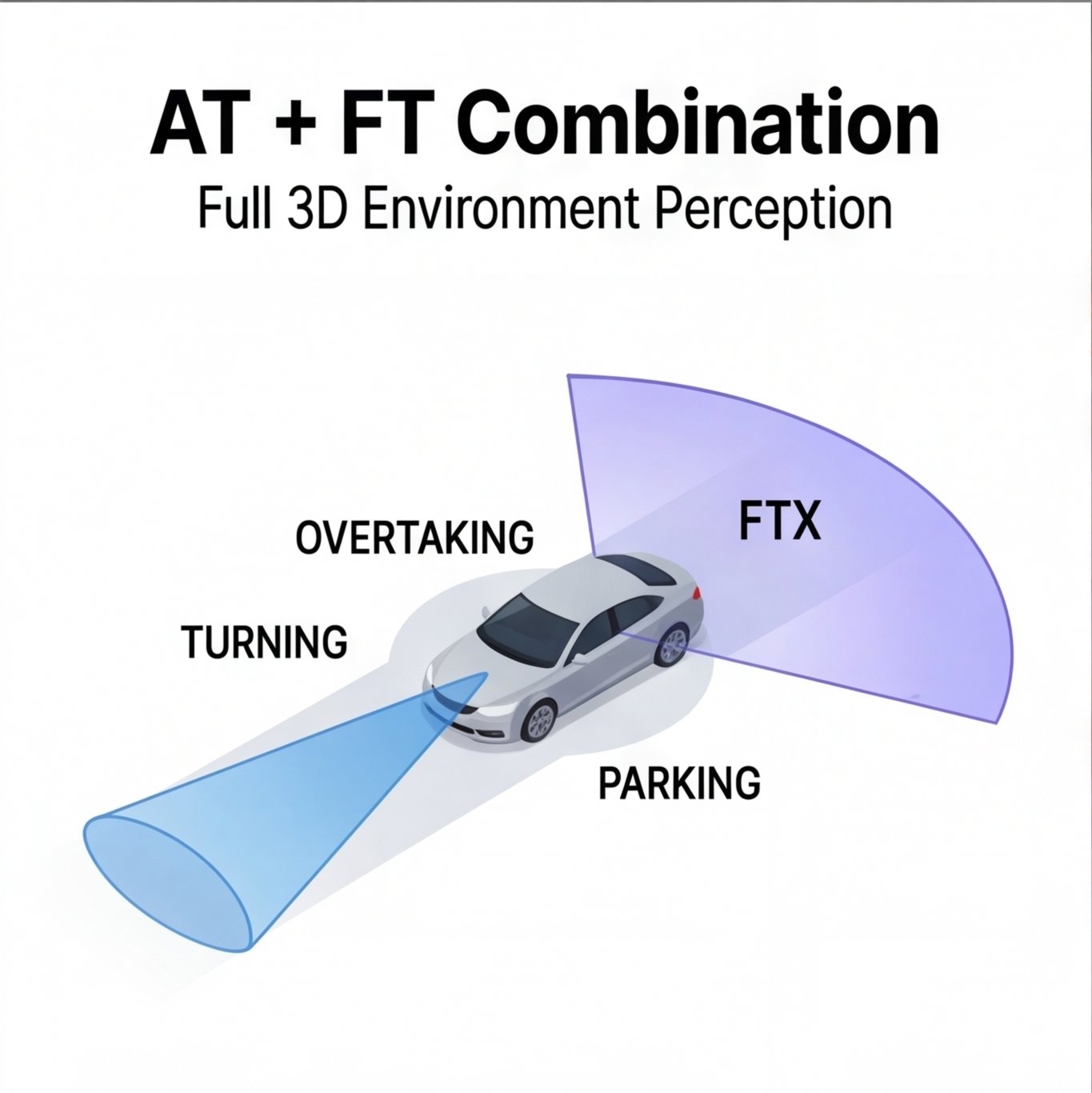
Automotive: Parking Sensors to Level 5 Autonomy
Early automotive LiDAR applications — parking assist, blind-spot monitoring — relied on simple 2D proximity sensing. That’s sufficient when the goal is detecting presence. But achieving Level 4 or Level 5 autonomy requires distinguishing between a pedestrian, a cyclist, and a roadside tree at speed, across dynamic environments. 3D LiDAR is non-negotiable at that tier. When evaluating 3d lidar price against safety outcomes in autonomous vehicles, the cost calculus shifts dramatically — sensor failure isn’t a navigation error, it’s a liability.
Best Fit: 2D for driver-assist features; 3D for full autonomy and HD mapping.
Surveying: Forestry Biomass and Digital Twins
Aerial and terrestrial 3D LiDAR has transformed large-scale surveying. Forestry teams use it to estimate biomass by capturing canopy structure in three dimensions. Urban planners build city-scale digital twins from dense point clouds. No 2D approach can approximate this fidelity.
Best Fit: 3D LiDAR exclusively for surveying applications requiring spatial accuracy.
Safety: Human-Robot Collaboration Zones
In collaborative workspaces, 3D LiDAR functions as a dynamic safety curtain, detecting human intrusion across full volumetric zones — not just at a single elevation. A 2D scanner could miss a person crouching or leaning into a robot’s path.
Best Fit: 3D for any safety-critical human-robot environment.
Each of these applications pushes against a common question: what happens when budget constraints make full 3D deployment impractical? That tension points toward something worth exploring — the hybrid approaches that attempt to bridge the gap.
The Hybrid Middle Ground: Can You Turn 2D into 3D?
Engineers facing tight budgets have long asked whether clever software can bridge the dimensional gap. The short answer: partially, and with meaningful caveats.
The most common approach is SLAM (Simultaneous Localization and Mapping), which uses a 2D sensor’s sequential scan data to construct a layered spatial model as a robot moves through an environment. By stitching together successive 2D slices over time, SLAM algorithms build something that resembles a 3D map — though it’s dependent on controlled movement and a stable environment.
“Direct 3D mapping with a 2D LiDAR is possible using sparse reference maps to fill the gaps.” — ISPRS Journal via ScienceDirect
This sparse reference map technique pre-loads known structural geometry, then uses the 2D sensor’s live data to localize within that model. It works reasonably well in static, predictable spaces like fixed warehouse aisles.
A second strategy is sensor fusion — pairing 2D LiDAR with RGB cameras. As noted in research from Oakland University (NAECON), engineers use camera fusion to add depth context to 2D LiDAR data in indoor modeling, compensating for what the scanner can’t perceive vertically.
“Fusion adds context, but it doesn’t add reliability. The camera fills gaps the LiDAR leaves — until lighting changes, and suddenly both sensors are guessing.” — Robotics Engineering Forum
Understanding what is 3D LiDAR makes the limitation obvious: a true multi-layer sensor captures simultaneous, hardware-verified depth across a full field. Simulated 3D cannot replicate that. In high-speed or safety-critical applications — think autonomous forklifts operating near workers — latency, occlusion handling, and object classification failures make software-approximated 3D a liability rather than a solution.
These trade-offs point directly toward a structured decision process, which the next section addresses with a practical framework.
Decision Matrix: Choosing the Right Sensor for Your Project
Cutting through the noise comes down to four honest questions. Answer them in order, and the right sensor becomes obvious.
If/Then Decision Checklist:
- If your environment has flat floors and controlled lighting → Then 2D LiDAR is sufficient. Structured warehouses with fixed conveyor heights rarely need a full LiDAR point cloud with volumetric depth.
- If you need to classify what an obstacle is — a forklift versus a person — → Then go 3D. Object recognition demands the dimensional richness that 2D simply can’t deliver.
- If your vehicle exceeds 5 mph → Then go 3D. At higher speeds, reaction windows shrink, and 3D LiDAR’s greater accuracy in unpredictable environments becomes a safety requirement, not a preference.
- If your bill of materials must stay under $1,000 → Then 2D LiDAR paired with camera fusion offers the most practical trade-off between cost and situational awareness.
The sensor you choose doesn’t just shape your budget — it defines the ceiling of what your system can ever safely perceive.
No single technology wins universally. Match the dimensionality to the demand, and autonomy follows.
Key Takeaways
- Laser count: 2D sensors use a single laser channel; 3D systems stack anywhere from 16 to 128 channels simultaneously
- Mechanical complexity: Traditional spinning 3D sensors contain precision motors, bearings, and rotating assemblies that are expensive to manufacture and calibrate
- Processing power requirements: Generating and interpreting dense point clouds demands significantly more onboard computation
- Data storage overhead: A single 3D sensor can produce hundreds of megabytes of point cloud data per minute, requiring robust storage and pipeline infrastructure
- If you need to classify what an obstacle is — a forklift versus a person — → Then go 3D. Object recognition demands the dimensional richness that 2D simply can’t deliver.









