










High-Precision 2D LiDAR Scanner
PAVO2 is a high-performance LiDAR product. Designed using the Time of Flight (TOF) principle, it obtains high-precision distance information through precise time measurement of laser pulse reflection, and completes a two-dimensional scan of the surrounding environment with motor rotation.
PAVO2 can reliably measure distances within a 50 m range with a 360° scanning angle, supporting a maximum scanning frame rate of 100Hz and a laser sampling rate of 225 kHz, leading the industry. 225,000 point cloud data points per second enable PAVO2 to accurately reconstruct the surrounding environment. Corresponding to the high sampling rate, PAVO2 offers a maximum angular resolution of 0.08°, significantly enhancing its ability to identify small targets and effectively reducing the false negative rate..
PAVO2 features a semi-solid-state design, achieving an IP67 protection rating, suitable for demanding industrial environments or complex outdoor scenarios. High-quality, long-life motors and a lightweight design ensure long-term stable operation, and excellent optical performance guarantees that PAVO2 performs exceptionally well even in strong sunlight. It uses a 905 nm laser wavelength and meets Class I eye safety standards.
With the SimiView control software and SDK package provided by SIMINICS, users can easily and quickly begin system-level development. PAVO2 can be used in fields such as robot positioning and navigation, mapping, environmental modeling, and security.
Working principle
PAVO2 is a TOF (Time-of-Flight) radar, whose core components include optical, mechanical, circuit, and software parts. During operation,the laser emits a laser beam outwards. When the beam strikes an object, it is reflected. The receiver detects the reflected light signal,and then the time analysis module measures the time difference between the reflected light and the emitted light. Multiplying this time difference by the speed of light gives the distance the light traveled, thus allowing the position of the measured object to be calculated.
Single-point fixed-position measurements can only provide distance information to the target. To obtain information from multiple angles, the PAVO2 is equipped with a rotating motor. By rotating the motor, distance measurements are taken from different angles, which are then combined to create a contour image of the surrounding environment.
characteristic
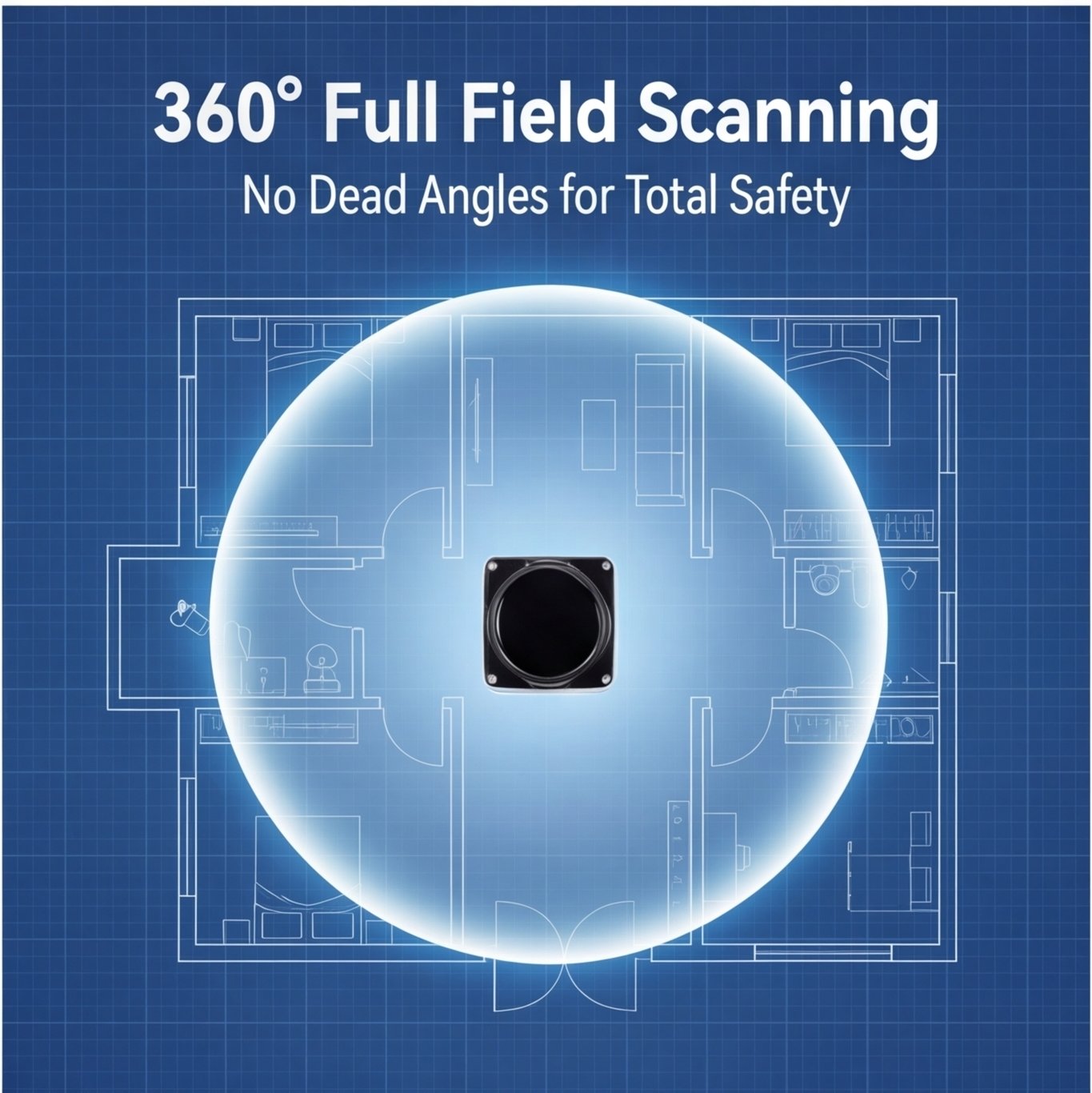
PAVO2 can provide 360° point cloud information, with the 180° position located directly in front of the sensor and indicated by a triangular mark on the top. From a top-down perspective, the angle increases in a counter-clockwise direction.
Using the sensor base plane as the reference plane, the height of the laser emission point of PAVO2 from the reference plane is 53.6 mm.
Each PAVO2 machine has a slight deviation in the vertical angle of its emitted laser. With the horizontal plane as the reference, the vertical angle deviation range of the PAVO2’s emitted laser is ±1°.
PAVO2 uses a semiconductor laser as the light source. After beam shaping, the divergence angle of the entire light spot is approximately 2.5 mrad in the vertical direction and approximately 7.5 mrad in the horizontal direction; that is, the light spot shape on a target 10 m away has a vertical width of approximately 25 mm and a horizontal width of 75 mm.
PAVO2 uses a low-power 905 nm laser light source and uses pulse modulation to reduce the average power. It meets Class I laser safety standards, ensuring safety for the human eye.
PAVO2 comes with two cables: cable ① is the network cable; cable ② is the power cable.The network cable is 0.5m long with a standard RJ45 connector, and the power cable is 0.5m long with a 5.5mm/2.1mm power connector.
Software
The lidar uses SimiView software to read and configure relevant radar parameters, visualize and analyze point cloud data, making it convenient for users.
The Pavo2SDK package encapsulates and parses radar-related information, allowing users to quickly
perform secondary development by calling the relevant APIs.